








CERNは革新的なロボットソリューション、CERNquadbotを導入した。CERNquadbotは、特に研究所の入り組んだ施設内の乱雑で危険な環境を移動するために設計された。この4本足のロボットは最近、CERNの広大な北エリアで放射線防護テストを成功させ、困難な地形での適応性と敏捷性を示した。
937号棟で開発されたCERNquadbotは、その革新的な4本脚のデザインにより、CERNの先進的なロボットの中でも際立っており、凹凸のある路面でも比類のない安定性と操縦性を発揮します。
CERNのロボット工学エンジニアであるクリス・マックグリービーは、緩いワイヤーや動くパイプがある環境で車輪付きロボットが直面する限界を強調し、この進歩の意義を強調する。
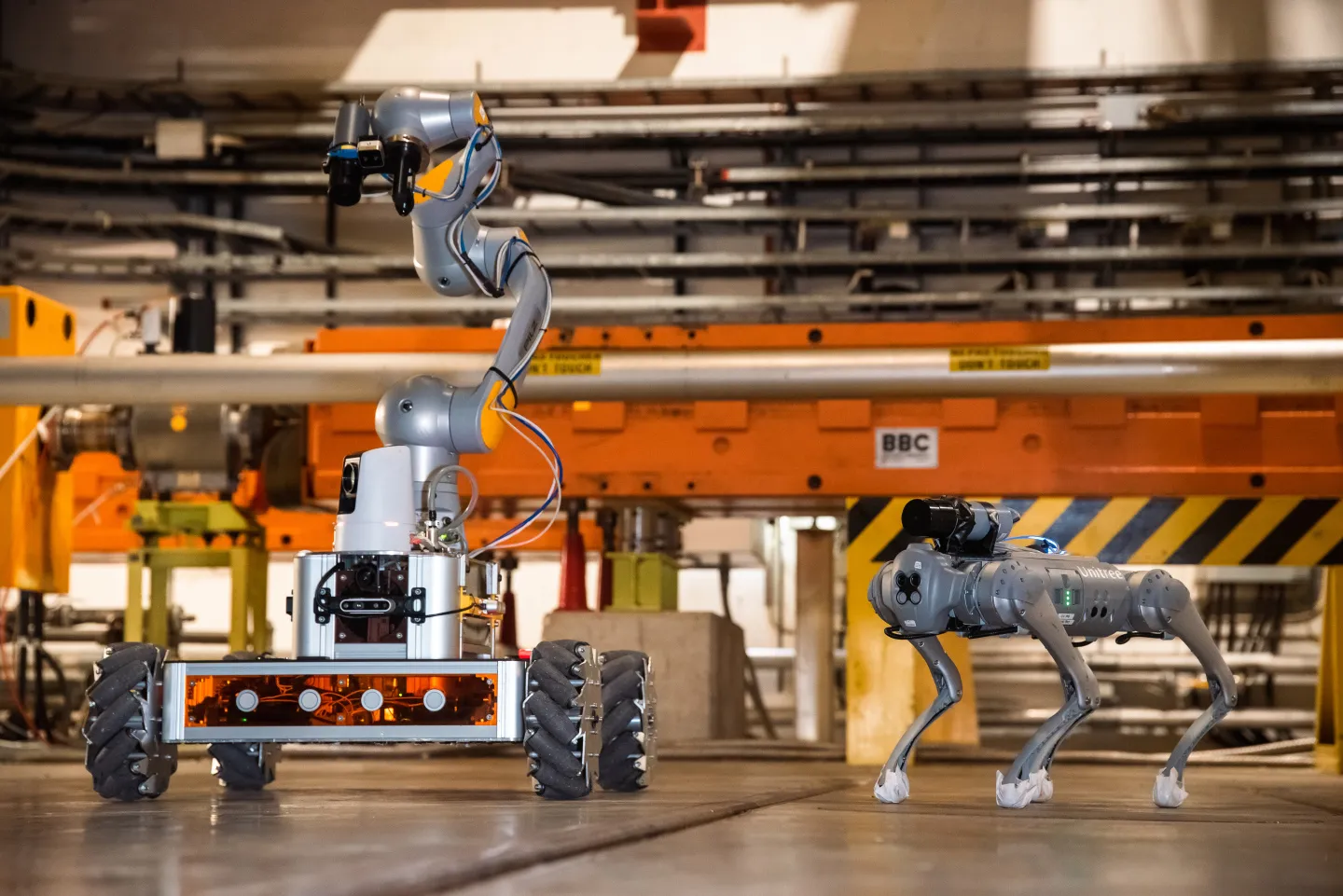
ロボドッグはCERNBotNA(ノース・エリア)と共に、CERN最大の実験ゾーン内で放射線防護調査を実施し、この2つのロボットのコラボレーションは成功を収めた。(画像:M.Struik/CERN)
CERNquadbotの多用途性は、安定性だけにとどまらない。高度な制御アルゴリズムを備えたこのロボットの仲間は、ALICE検出器のような実験を収容する洞窟を含む複雑な環境をナビゲートすることができる。環境条件を監視し、水漏れや火災などの異常を検知する能力は、トンネルや洞窟内の機械の運転を維持するために極めて重要である。
CERNのアプローチでは、各ロボットが特定の目的を果たす補完的なロボティクス・エコシステムを構築している。トレイン・インスペクション・モノレール(TIM)が大型ハドロン衝突型加速器(LHC)内の長距離を上空から監視するのに優れている一方で、CERNquadbotはビームラインの下の地上で未知の領域を探索する。この共生関係は、CERNのロボット艦隊の全体的な探査能力を高めている。
研究者たちがロボット工学の限界に挑み続ける中、CERNのユニークなインフラストラクチャー内での探査と発見において、将来はさらなる進歩が期待される。CERNquadbotは、ロボットがCERNの複雑な環境内を移動し、相互作用する方法に革命をもたらし、素粒子物理学における探査の地平を拡大することを約束する。










